|
力曲线,其中传感器
阻力是作用力的函数。曲线因传感器型号而异,但可以
通常可以很好地用形式为𝑦=ax-𝑏的函数来近似
.
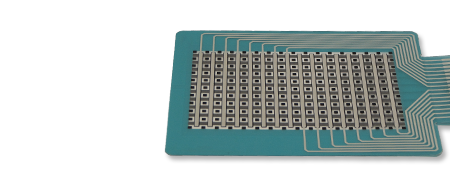
图6:离散阵列
图7:矩阵阵列
下图显示了一个示例响应曲线,使用了由驱动的单区FSR的测试数据
自动动态测试夹具上的力扫描。
显然,上面绘制的关系是非线性的。但是,当相同的数据集在
对数标度(两个轴),结果接近线性,如下图所示。
虽然曲线数据值随传感器模型变化很大,但此示例曲线的近似形状是
力感电阻固有的,通常描述任何给定FSR的响应。
图8:FSR特性曲线示例(阻力与力)
图9:相同的特性测试数据,在对数刻度上重新填充
值得注意的是,安装和驱动可以显著改变特性曲线。所以,
而裸传感器(无间隔)的数据表曲线可用作系统中的设计指南
为了获得良好的精度,需要进行特征描述和校准。
精确度限制
力与电阻的精度因传感器型号而异,但通常仅限于一个大概的数字
+/-10%,即使是在设计良好的机械系统中,具有一致的驱动。
fsr不打算在需要高绝对精度的设计中取代应变计或称重传感器
必修的。然而,FSRs在低物理损耗方面比称重传感器有显著的优势
外形和成本效益(不需要桥接电路或仪表放大器),在应用中
可接受相对力或航向绝对力测量。
例如,FSRs在各种各样的人类触摸应用中表现出色,其中10%的绝对方差
力几乎是不可察觉的。FSRs的相对精度是相当好的,因此在实际应用中也是理想的
绘图应用,其中力的分布是有意义的,但绝对力/重量不是
特别相关。
负载滞后
负载滞后描述了先前施加的力对当前FSR电阻的影响。
这里有一个例子:一个FSR在休息一段时间。当一个100克的重量放在上面时
FSR的电阻是10欧姆。接下来,在FSR上放置一个5kg的大砝码。之后
几个小时后,5公斤的重量被移除,原来100克的重量被放回传感器上。
这一次,传感器的电阻测量值为6千欧,并慢慢向10千欧方向攀升。
虽然可以表征和补偿负载滞后(非常复杂)
在软件算法中,只需将负载大小和持续时间限制为
不会造成过度滞后。
热漂移
与任何电阻传感器一样,fsr在一定程度上受环境温度的影响。
一般来说,fsr的电阻随着环境温度的升高而增大。确切的关系
电阻与温度的关系取决于油墨的组成和比表面积,而FSR必须
在低漂移应用中进行特征化/补偿。
分力和压力
在严格的技术意义上,力感应电阻感测压力(力x面积),而不是力。
用同样的力,比如说,手指和触针尖,会产生完全不同的结果
电阻响应。
驱动变化的影响如下图所示,图中显示了相同的力
应用于同一传感器的扫描,使用两个不同的执行器(宽端与窄端)。
反应的显著差异表明了一致的机械反应的重要性
压力响应隔离力驱动。
致动器设计考虑因素将在下一节中讨论。
启动
如前所述,一致驱动是实现一致FSR读数的关键因素。
致动器几何结构在很大程度上是特定于应用的,但一些通用类型及其优点是有限的
在下面的例子中讨论。
图13:宽尖端致动器图12:窄尖端致动器
图11:宽尖端致动器结果图10:窄尖端致动器结果
致动器系统对于提高装置的零件间再现性至关重要
FSR。促动器是指“接触”或促动FSR的装置或方式。作为
柔性上基板偏转并屈服于致动器施加的力,最初存在
FSR元件和电路之间接触面积小。随着力的增加
接触也增加,输出变得更导电。所用的墨水,纸张的硬度
基板和FSR结构的其他特性影响应用程序之间的关系
力和阻力。
只要持续施力,cyc |