|
有无FSR。每条记录道的虚线表示平均值
而实线水平线是
平均值。
给定7N阈值。另外15名参与者
要求使用FSR集成魔杖,阈值设置为
6 N(表2)。大多数参与者再次超过
力阈值,尽管范围包括附近的力
阈值比阈值高出近5N(图7)。
每个实验的变异性平均为12%RSD,
这又是一个相当大的减少可变性相比
使用一根普通的魔杖而不需要一个完整的FSR。只有
22名操作员中的一名认为7N阈值很困难
他们在申请时感到不适
这种程度的力量。当然,这些结果仅限于
研究参与者,并需要进行更大规模的调查
确定此固定力阈值是否适合
筛选者的目标人群。
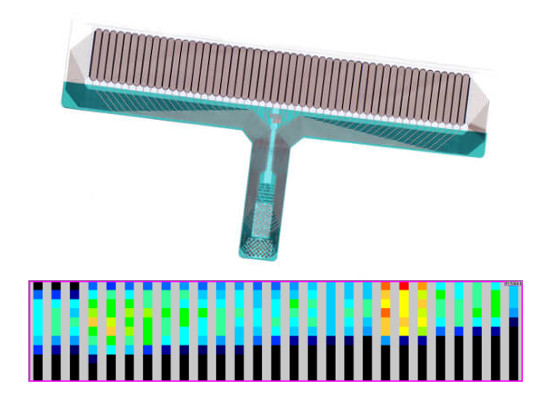
图8显示了单个操作员的作用力
无需在FSR中集成采样。结束
采样时间为10s,无FSR时最小力为
大约3N,相比之下最小6.5N
可行性研究报告。在取样棒中增加一个FSR保持不变
平均变化率下降,平均作用力增大,
把最小值限制在阈值附近。改进
爆炸物检测,我们的首要目标是确保
所用作用力始终大于7N,因此
限制阈值和可变性的降低都是
在这些实验中得到了证明。
表二
使用FSR杆绿灯的刮水力
阈值设置为6N
图9。魔杖顶端示意图,说明了FSR
可作为角度指示器和力指示器使用。如果
魔杖的角度超出预定范围,然后FSR感知
零力,LED变红。
根据结果,我们建议将阈值设置为7N。
此外,集成的FSR还提供了第二个好处
目视确认施加了足够的力。
这个特殊的魔杖有一个圆形的背面
擦拭,使接触区域沿着摇摆移动
基于魔杖角度的方向。最适合
在有限的摇摆范围内获得粒子收集
角度,在这种情况下,FSR也充当角度指示器。
图9示出了示出FSR如何进行的示意图
用作角度指示器和力指示器。
FSR用绿线表示,位于
擦拭的最佳位置。
六、 成像棒接触区
虽然设计上的限制,如可变接触面积
以上所述可以通过集成的FSRs来克服,它是
最好的设计是在正常情况下正常工作
用法。基于阵列的FSR在这方面非常有用,
为改进魔杖设计提供必要的信息。为
最大限度的收集效率,魔杖应集中
收集粒子以充分利用
擦拭。这需要在该地区均匀分布兵力
通常通过使用
STAYMATES等人:国土安全应用的压力敏感取样棒4849
图10。带有两种不同类型附加保险杠的ETD魔杖(左)
由FSR阵列(中心)成像的压力分布和产生的粒子
湿巾收集(右)。
图11。力中心线(白色)和压力分布(0 kPa
–96千帕),使用聚氨酯和硅橡胶缓冲器取样
附件。
适形表面,如橡胶或聚合材料,
作为擦拭背后的后盾。压力分布
由附在魔杖上和下面的不同表面产生
正常的使用可以成像并与潜在的
粒子收集。
例如,两个不同的圆盘或缓冲器
橡胶硬度(45)或硅橡胶
(硬度计硬度为60–70)如图所示
图10中的ETD魔杖。这些保险杠坐在棉花后面
擦拭,如图10所示,带有“最佳位置”
在布上圆形标记所限定的区域内。这个
缓冲器在所用力下的压力分布
擦拭取样如图10中心所示。
较硬的聚氨酯保险杠有高压区
在外围和内部联系很少,而
更软的硅橡胶保险杠更均匀
压力分布。用擦拭法评估粒子收集
在一张复写纸上取样,其分布为
定性上与两者的压力分布相同
保险杠。压力分布的差异
擦拭取样时的两个缓冲器如图11所示,
以蛇形模式取样
甲1以蛇形模式取样
一个10厘米乘10厘米的区域,力约为4牛顿。这个
聚氨酯保险杠使魔杖与
形成月牙形压力分布。
这会产生“雪犁”效应,其中粒子聚集
建立在一个领先的优势,压倒性的收集
有限区域的擦拭能力。硅胶缓冲器
自然更容易紧靠表面和整个区域
可用于
粒子收集。图11展示了如何基于阵列的fsr
图12。两个用于表面取样的棕榈棒原型。顶部
图像显示计算机辅助设计(CAD)模型,而底部图像
显示起作用的原型版本。(A)中的棕榈棒是为
(B)中的项目列表DX和手掌杆是为500DT设计的
史密斯探测公司(加拿大蒙特利尔)。
可用于可视化力和压力分布
各种各样的取样棒设计。
七。总结和未来方向
本文的工作已经证明了它的有效性
将灵活的FSR应用到多个国土安全应用程序中,
尤其是从
表面。
动载作用下fsr的非线性行为
使用一个独特的测量系统来观察情况
它用一个可充气的气囊对
FSRs的活动区。这个系统也被用来
评估尝试校正的不同校准算法
对于非线性FSR响应。
将FSR技术集成到擦拭取样棒中
使用微处理器、电池和
多色LED。当力不足时,此LED为红色
正在由用户应用。当集成FSR感应到
力为7N时,LED变绿,用户可以看到
表面受到足够力的迹象。
7n阈值基于改进的ETD检测
以及人为因素(人们能够
常规应用)。FSR集成棒使用
22名志愿者,并被发现提供了足够的反馈
为了让使用者保持平均力在或以上,
门槛。FSR反馈的另一个好处
是指取样过程中力变化的减少。阿尔索
提到了综合FSR作为
角度指示器。这有助于确保收集到的材料
擦拭过程中,采样集中在
收集擦除。
在擦拭采样过程中施加在表面上的动态力用基于阵列的FSR成像。影响
简单的修改棒,如添加橡胶
保险杠,是用Tekscan系统可视化的。影响
这些保险杠在压力分布上的改进有
在质量上与潜在的
粒子收集。
同时展示了FSR的成功整合
商用痕量采样的传感技术
我们正在开发一种新型的取样棒
非常规的外形。这些新的取样棒是
被称为“棕榈棒”,因为他们的形状和大小适合
4850 IEEE传感器杂志,第13卷,第12期,2013年12月
用户的手掌。这个概念
手持魔杖引起了我们利益相关者的兴趣
在追踪检测社区里。通过定位
手靠近擦拭接触区域并缩短
手腕所经历的力矩,我们期望
使用者在用力时会感觉更舒服
表面取样期间。棕榈棒的两个例子是
如图12所示。
FSR和图6中所示的所有相关电路具有
加入了这些棕榈棒。这些尸体
魔杖是用objet30三维打印机(Objet)制作的
马萨诸塞州比勒里卡公司)。这台3D打印机使用喷墨打印
用塑料树脂制作物理模型的方法
材料。树脂最初处于液态,通过一系列喷墨喷嘴逐滴沉积在16μm厚的层中。
这种树脂是一种光致聚合物,在
紫外线。一旦沉积了一层液体树脂
高强度紫外线照射表面并治愈
层。然后再沉积另一层
重复的。一种凝胶状的支撑材料沉积在不同的位置
未来的空隙将会存在。此支撑材料是手动的
一旦建造完成,用高速水射流清除
完成。
这种附加制造技术为魔杖原型制造提供了许多优势,并有助于快速周转
在开发新的魔杖设计时。虽然还不清楚
如果FSR魔杖和棕榈魔杖将用于
在检查点环境下,我们确实预期它们会被用作训练
为使用跟踪检测技术的涉众提供的工具。
这项工作的下一步将包括 |